Руководство
Краткое руководства пользователя
Калибровка
Важно откалибровать акселерометры
GnuVario-E имеет акселерометр, который необходимо откалибровать.
Процедура калибровки
Калибровка выполняется в несколько этапов::
- Очистка SD-карты
- Измерение экспериментальных точек
- Расчет калибровочных значений
- Сохранение значений калибровки на SD-карту
Начиная с версии 0.10.2 WEB-сервера, шаги 3 и 4 упрощены.
Очистка SD карты
1. Сброс файла variocal.cfg
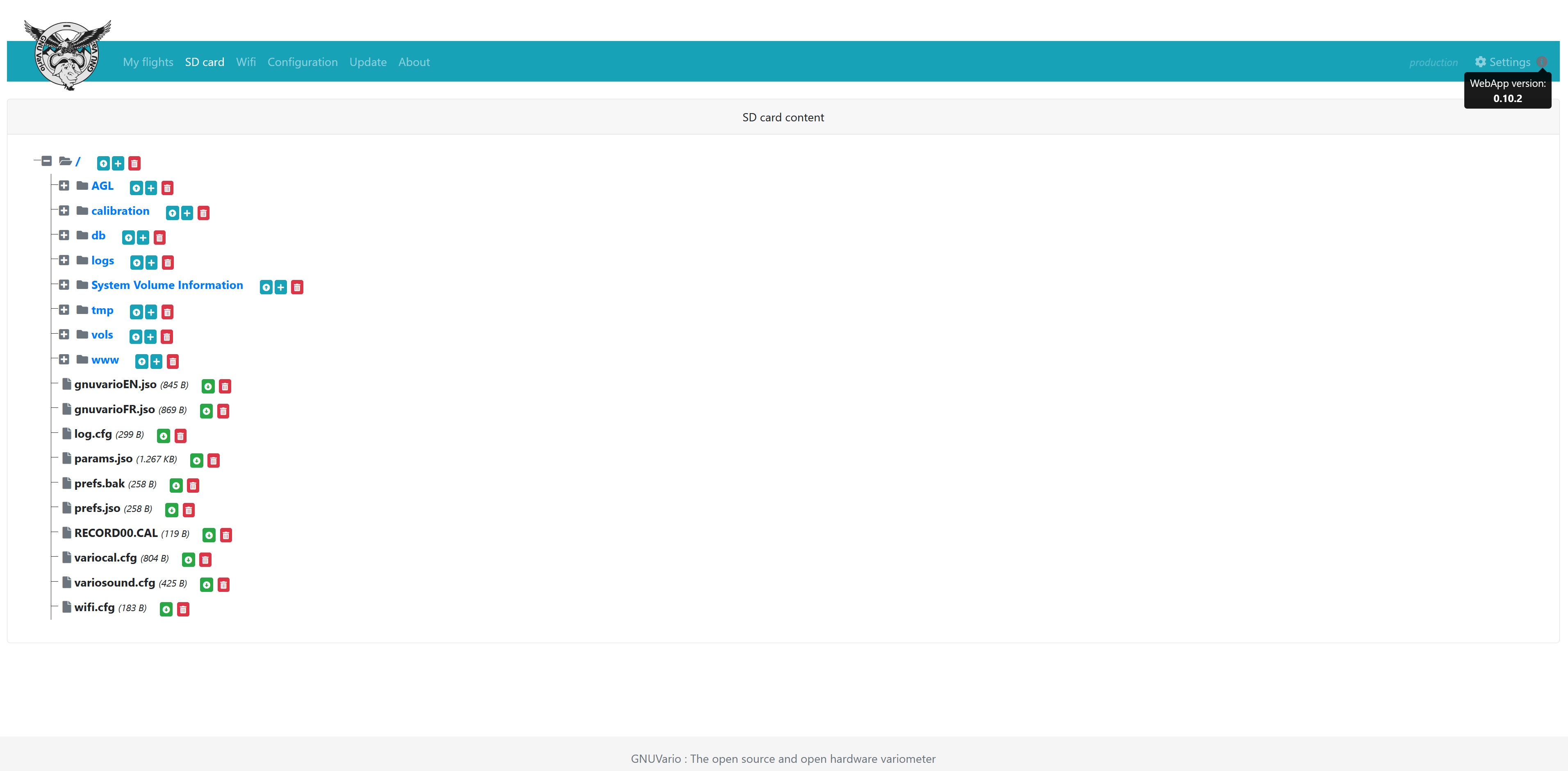
На WEB-сервере, на вкладке «SD-карта» или непосредственно на SD-карте убедитесь, что файл variocal.cfg действительно является пустым файлом, доступным в папке RootSD, и содержит:
Пустой файл `variocal.cfg`:
[VERSION=1.0]
/* Calibration */
[VERTACCEL_GYRO_CAL_BIAS_00=0x00]
[VERTACCEL_GYRO_CAL_BIAS_01=0x00]
[VERTACCEL_GYRO_CAL_BIAS_02=0x00]
[VERTACCEL_GYRO_CAL_BIAS_03=0x00]
[VERTACCEL_GYRO_CAL_BIAS_04=0x00]
[VERTACCEL_GYRO_CAL_BIAS_05=0x00]
[VERTACCEL_GYRO_CAL_BIAS_06=0x00]
[VERTACCEL_GYRO_CAL_BIAS_07=0x00]
[VERTACCEL_GYRO_CAL_BIAS_08=0x00]
[VERTACCEL_GYRO_CAL_BIAS_09=0x00]
[VERTACCEL_GYRO_CAL_BIAS_10=0x00]
[VERTACCEL_GYRO_CAL_BIAS_11=0x00]
[VERTACCEL_ACCEL_CAL_BIAS_00=0]
[VERTACCEL_ACCEL_CAL_BIAS_01=0]
[VERTACCEL_ACCEL_CAL_BIAS_02=0]
[VERTACCEL_ACCEL_CAL_SCALE=0]
[VERTACCEL_MAG_CAL_BIAS_00=0]
[VERTACCEL_MAG_CAL_BIAS_01=0]
[VERTACCEL_MAG_CAL_BIAS_02=0]
[VERTACCEL_MAG_CAL_PROJ_SCALE=-16689]
[VERTACCEL_ACCEL_CAL_BIAS_MULTIPLIER=6]
[VERTACCEL_MAG_CAL_BIAS_MULTIPLIER=4]2. Удалите файл RECORD00.CAL если он есть.
Измерения
Убедитесь, что ваша SD-карта находится внутри вариометра.
Включите Gnuvario-E или перезагрузите его. Войдите в режим калибровки, нажав правую кнопку при запуске (на экране инициализации). У вас есть несколько секунд, чтобы поставить вариометр на ровную поверхность и нажать центральную кнопку.
Для достижения оптимального результата калибровку не следует выполнять по оси север / юг. Если вы знаете, где находится север, попробуйте сместить вариометр на 45° от севера (когда он ровно лежит на столе).
Дождитесь 3 звуковых сигналов затем начните вращать вариометр во всех плоскостях, используя подставку (картон, книгу), чтобы стабилизировать его на краю. Вы должны сделать примерно 5-6 измерений на каждую плоскость вращения, ожидая звукового сигнала между каждым измерением. Чем больше измерений вы сделаете, тем точнее будет калибровка.
ВНИМАНИЕ, важно не забыть ни одной плоскости
В конце нажмите левую кнопку вариометра, как минимум на две секунды, чтобы завершить калибровку. Варио перезапустится.
Расчет и сохранение калибровочных значений
Вернитесь в WEB-сервер, перейдите на вкладку «Настройки», затем «Калибровка».
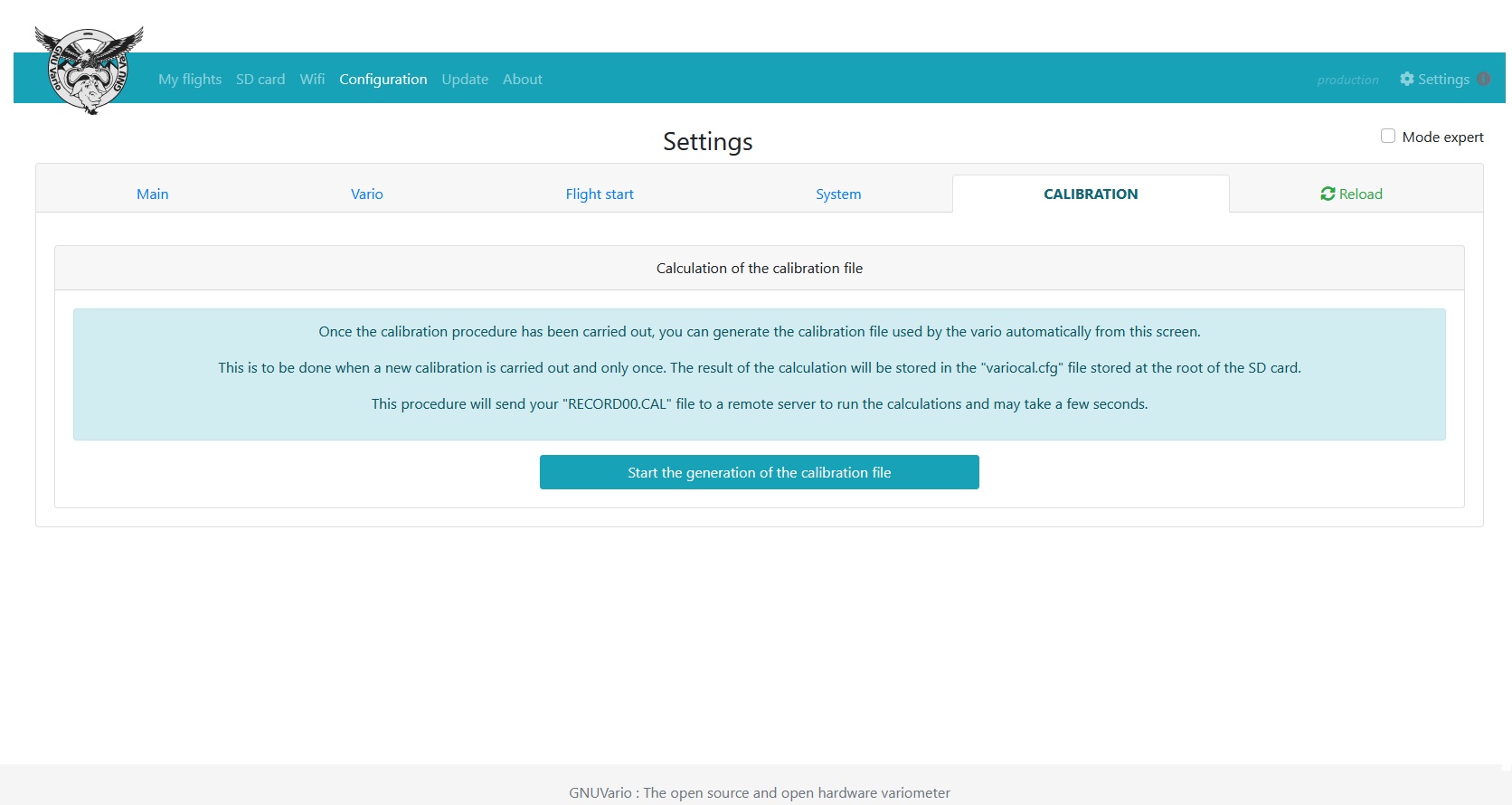
Нажмите «Начать создание файла калибровки». Файл RECORD00.CAL созданный на этапе калибровки, отправляется на удаленный сервер, который вычисляет правильные значения и обновляет файл variocal.cfg.
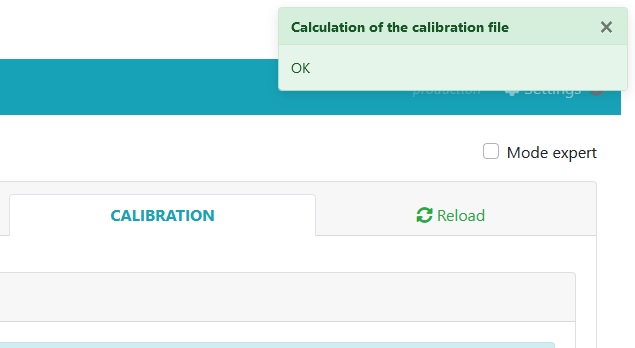
Если появляется сообщение «Расчет калибровочного файла ОК», значит, все прошло успешно. Ваш вариометр откалиброван.
Расчет значений калибровки с помощью скрипта Python
Если описанная выше полуавтоматическая процедура не работает, вы можете рассчитать значения калибровки с помощью скрипта Python после очистки SD-карты и измерения экспериментальных точек.
Инструкции для пользователей Windows и Mac
1. Сначала установите в Windows или Mac Python version 2 или version 3. В Windows обязательно отметьте опцию add to PATH variable.

Install python ‘numpy’ library:
c:>pip install numpy Установка библиотеки на MacOS:
~ $ sudo pip3 install numpy 2. Скопируйте папку «calibration», находящуюся в RootSD.
3. В Windows или Mac, запустите Idle Python и запустите программу get-pip.py находящуюся в calibration/Installation. Нажмите F5 для запуска.
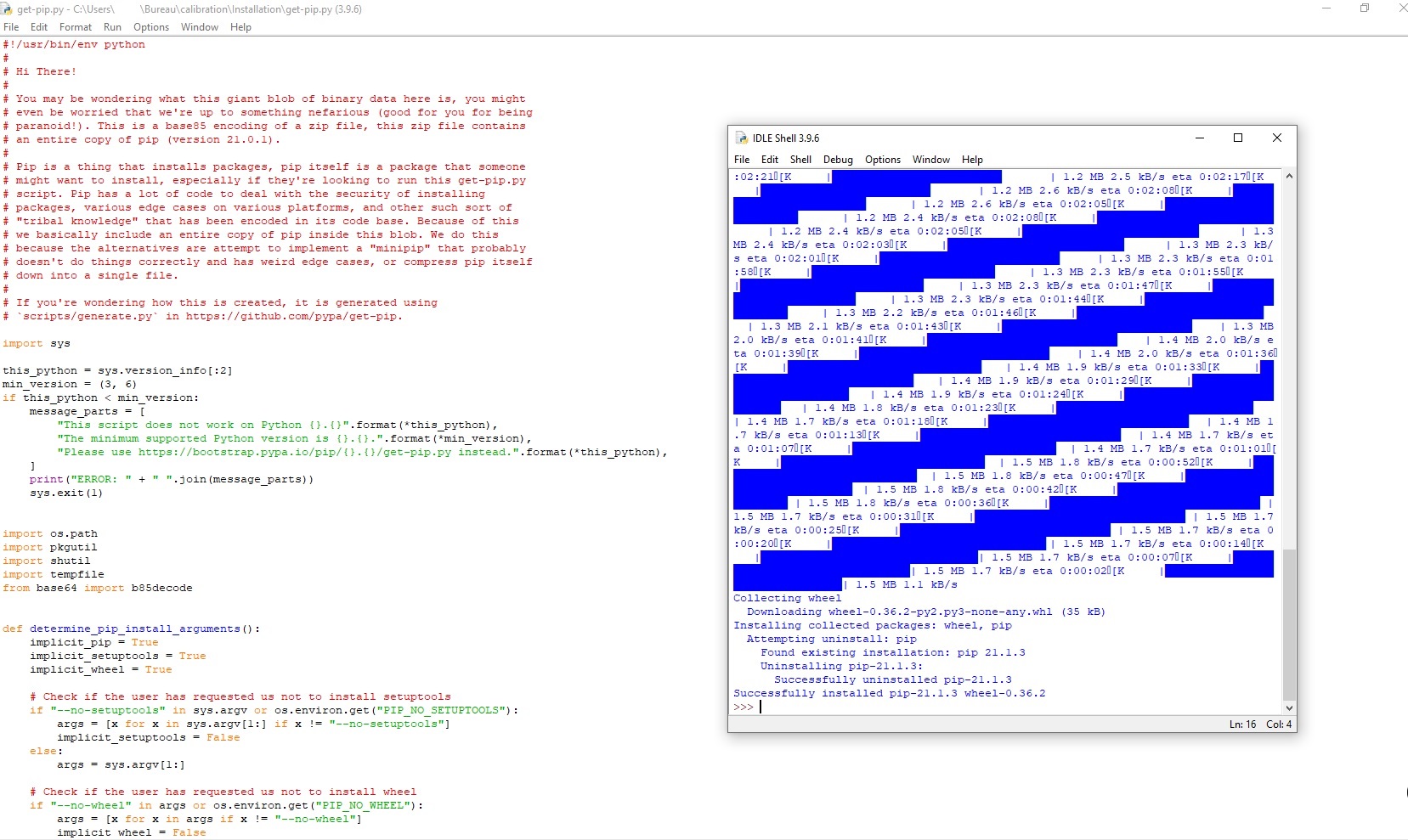
4. Когда выполнение будет завершено, откройте командную строку Windows.
Скопируйте и выполните следующую команду: python -m pip install --user numpy scipy matplotlib ipython jupyter pandas sympy nose
После выполнения команды перезагрузите компьютер.
5. Удалите файл RECORD00.CAL уже находящийся в папке calibration
6. Скопируйте файл RECORD00.CAL созданный на SD-карте, в папку calibration
7. В Windows или Mac, запустите Idle Python и запустите программу calibrate.py который находится в папке calibration
8. Нажмите F5 для запуска.
9. Вы также можете написать команду непосредственно python calibrate.py в командной строке Windows, после изменения каталога (команды cd) для перехода в папку calibration :
c:> cd calibration
c: \ calibration> python calibrate.pyв Linux, просто запустите:
~ $ cd calibration
~ / calibration $ python3 calibrate.py
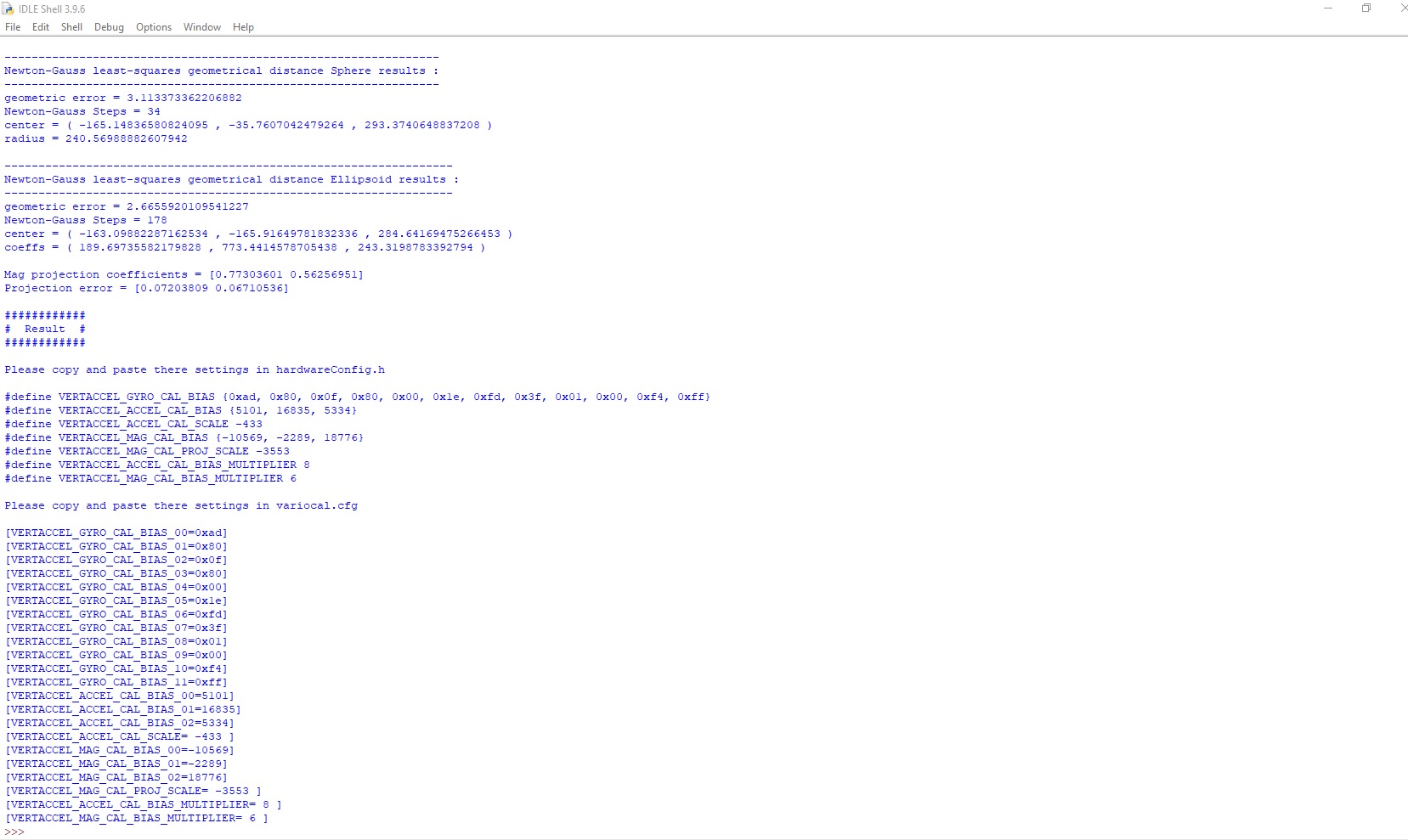
10. По окончании выполнения программы скопируйте все параметры калибровки в файл variocal.cfg находящийся на SD-карте.
Пример обновленного файла `variocal.cfg` со значениями калибровки:
[VERSION=1.0]
/* Calibration */
[VERTACCEL_GYRO_CAL_BIAS_00=0xad]
[VERTACCEL_GYRO_CAL_BIAS_01=0x80]
[VERTACCEL_GYRO_CAL_BIAS_02=0x0f]
[VERTACCEL_GYRO_CAL_BIAS_03=0x80]
[VERTACCEL_GYRO_CAL_BIAS_04=0x00]
[VERTACCEL_GYRO_CAL_BIAS_05=0x1e]
[VERTACCEL_GYRO_CAL_BIAS_06=0xfd]
[VERTACCEL_GYRO_CAL_BIAS_07=0x3f]
[VERTACCEL_GYRO_CAL_BIAS_08=0x01]
[VERTACCEL_GYRO_CAL_BIAS_09=0x00]
[VERTACCEL_GYRO_CAL_BIAS_10=0xf4]
[VERTACCEL_GYRO_CAL_BIAS_11=0xff]
[VERTACCEL_ACCEL_CAL_BIAS_00=5101]
[VERTACCEL_ACCEL_CAL_BIAS_01=16835]
[VERTACCEL_ACCEL_CAL_BIAS_02=5334]
[VERTACCEL_ACCEL_CAL_SCALE= -433 ]
[VERTACCEL_MAG_CAL_BIAS_00=-10569]
[VERTACCEL_MAG_CAL_BIAS_01=-2289]
[VERTACCEL_MAG_CAL_BIAS_02=18776]
[VERTACCEL_MAG_CAL_PROJ_SCALE= -3553 ]
[VERTACCEL_ACCEL_CAL_BIAS_MULTIPLIER= 8 ]
[VERTACCEL_MAG_CAL_BIAS_MULTIPLIER= 6 ]11. Установите SD-карту в вариометр. Теперь он откалиброван.
Инструкции для пользователей Linux
-
Откройте консольный терминал
-
Создайте временный каталог, в котором будет выполняться калибровка (в приведенном ниже примере он называется
demo, затем перейдите в этот новый каталог.mkdir demo cd demo -
Скопируйте папку
calibrationизRootSDв папкуdemo, затем перейдите в этот новый каталог.Если у вас есть программное обеспечение
git, не очень хороший способ сделать это - клонировать репозиторий программного обеспечения из Github, а затем получить там папку:git clone https://github.com/prunkdump/GNUVario-TTGO-T5.git cp -r "./GNUVario-TTGO-T5/Sources/RootSd/Pour v0.8b6/RootSD/calibration" . cd calibration -
Поскольку он не очень чистый, вы можете сделать небольшую уборку перед тем, как начать.
rm -rf *.pyc *.old __pycache__ -
Скопируйте сделанные ранее измерения — , то есть файл
RECORD00.CAL, созданный на SD-карте, в папкуcalibration -
Обновление
pipи восстановлениеpipenv(что позволит вам делать все в виртуальной среде с правильной версией Python, а затем удалять ее, чтобы не загрязнять ваш компьютер)python -m pip install --upgrade pip python -m pip install pipenv -
Создание и запуск виртуальной среды
python -m pipenv --python 3.7 python -m pipenv shell -
Установка необходимых библиотек в окружение
python -m pip install numpy scipy matplotlib ipython jupyter pandas sympy nose -
Калибровка
python calibrate.pyСкопируйте сгенерированные значения в файл
variocal.cfg(см. Выше пример файлаvariocal.cfgобновленного значениями калибровки) -
Выйдите из виртуальной среды, затем удалите виртуальную среду и временную рабочую папку.
exit pip -m pipenv --rm cd .. cd .. rm -rf demo