Manuel Utilisateur
Résumé du manuel d'utilisation
La calibration
Le GnuVario-E intègre un accéléromètre, qui doit être calibré.
Procédure de calibration
La calibration s’effectue en plusieurs étapes :
- Nettoyage de la carte SD
- Mesure de points expérimentaux
- Calcul des valeurs de calibration
- Sauvegarde des valeurs de calibration sur la carte SD
Depuis la version 0.10.2 du serveur web, les étapes 3 et 4 sont simplifiées.
Nettoyage de la carte SD
1. Réinitialisation du fichier variocal.cfg
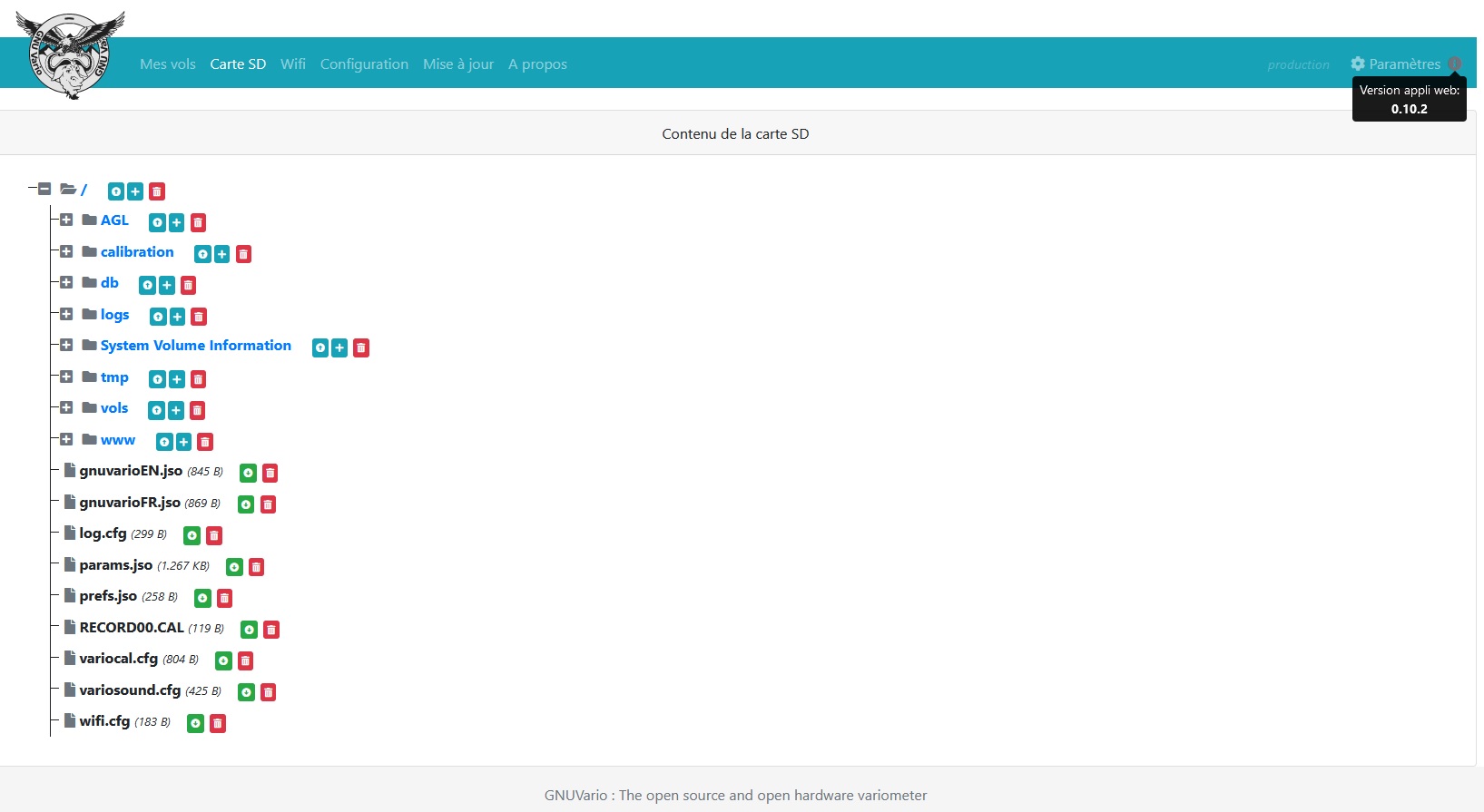
Depuis le serveur web, onglet « Carte SD » ou directement sur la carte
SD, vérifiez que le fichier variocal.cfg est bien le fichier vierge disponible
dans le dossier RootSD, dont voici un aperçu :
Fichier `variocal.cfg` vierge :
[VERSION=1.0]
/* Calibration */
[VERTACCEL_GYRO_CAL_BIAS_00=0x00]
[VERTACCEL_GYRO_CAL_BIAS_01=0x00]
[VERTACCEL_GYRO_CAL_BIAS_02=0x00]
[VERTACCEL_GYRO_CAL_BIAS_03=0x00]
[VERTACCEL_GYRO_CAL_BIAS_04=0x00]
[VERTACCEL_GYRO_CAL_BIAS_05=0x00]
[VERTACCEL_GYRO_CAL_BIAS_06=0x00]
[VERTACCEL_GYRO_CAL_BIAS_07=0x00]
[VERTACCEL_GYRO_CAL_BIAS_08=0x00]
[VERTACCEL_GYRO_CAL_BIAS_09=0x00]
[VERTACCEL_GYRO_CAL_BIAS_10=0x00]
[VERTACCEL_GYRO_CAL_BIAS_11=0x00]
[VERTACCEL_ACCEL_CAL_BIAS_00=0]
[VERTACCEL_ACCEL_CAL_BIAS_01=0]
[VERTACCEL_ACCEL_CAL_BIAS_02=0]
[VERTACCEL_ACCEL_CAL_SCALE=0]
[VERTACCEL_MAG_CAL_BIAS_00=0]
[VERTACCEL_MAG_CAL_BIAS_01=0]
[VERTACCEL_MAG_CAL_BIAS_02=0]
[VERTACCEL_MAG_CAL_PROJ_SCALE=-16689]
[VERTACCEL_ACCEL_CAL_BIAS_MULTIPLIER=6]
[VERTACCEL_MAG_CAL_BIAS_MULTIPLIER=4]2. Effacez le fichier RECORD00.CAL s’il est présent.
Mesures
Redémarrez le vario puis effectuez la manipulation de calibration :
Passez en mode calibration en appuyant sur le bouton droit au démarrage (au moment de l’écran d’init). Vous avez quelques secondes pour placer le vario à plat et appuyer sur le bouton central.
Pour être optimale, la calibration ne doit pas se faire sur un axe nord/sud. Si vous savez où est le nord, essayez de décaler le vario de 45° par rapport au nord (quand il est à plat sur la table).
Attendez les 3 bips, puis commencez à faire pivoter le vario dans toutes les directions en vous aidant d’un support (carton, livre) afin de le stabiliser sur sa tranche. Vous devez faire environ 5 à 6 déplacements par face en attendant le bip entre chaque déplacement. Plus vous ferez de mesures, plus la calibration sera précise. ATTENTION il est indispensable de n’oublier aucune face.
À la fin, appuyez sur le bouton gauche du vario pendant au moins deux secondes pour terminer la calibration. Le vario redémarre.
Calcul et sauvegarde des valeurs de calibration
Retournez sur le serveur web puis allez sur l’onglet « Configuration », puis « CALIBRATION »
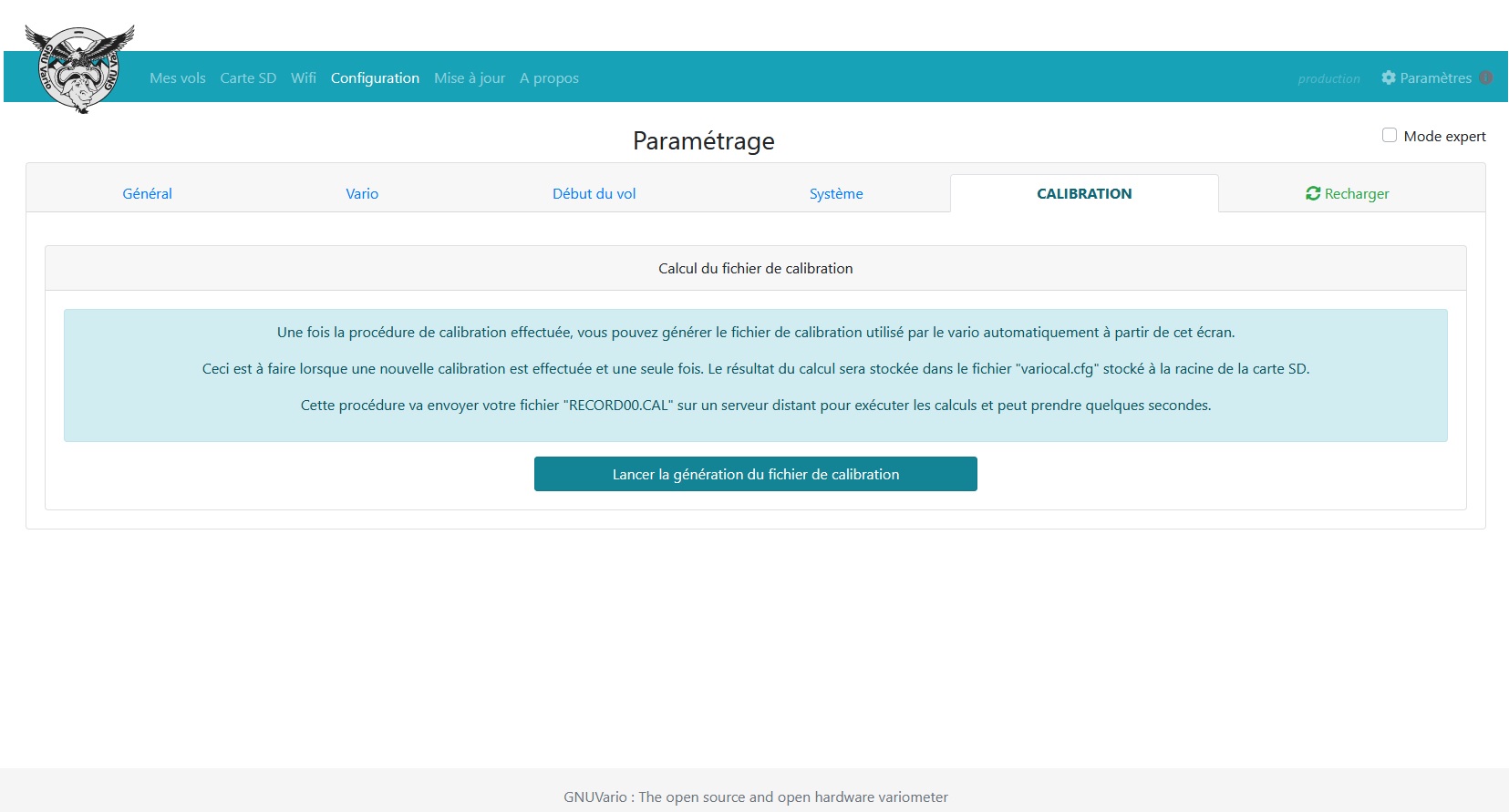
Appuyez sur « Lancer la génération du fichier de calibration ». Le fichier
RECORD00.CAL créé pendant la phase de calibration est envoyé sur un serveur
distant qui calcule les bonnes valeurs et met à jour le fichier variocal.cfg.
Si le message « Calcul du fichier de calibration OK » apparait, c’est que tout s’est bien passé. Votre vario est calibré.
Calcul des valeurs de calibration à l’aide du script Python
Si la procédure semi-automatique décrite ci-dessus ne fonctionne pas, vous pouvez calculer les valeurs de calibration avec un script python, après avoir effectué le nettoyage de la carte SD et la mesure de points expérimentaux.
Instructions pour les utilisateurs de Windows
1. Installez le programme Python. Assurez-vous de cocher l’option add Python x.x to PATH.

2. Copiez sur votre bureau le dossier « calibration » se trouvant dans le
dossier RootSD.
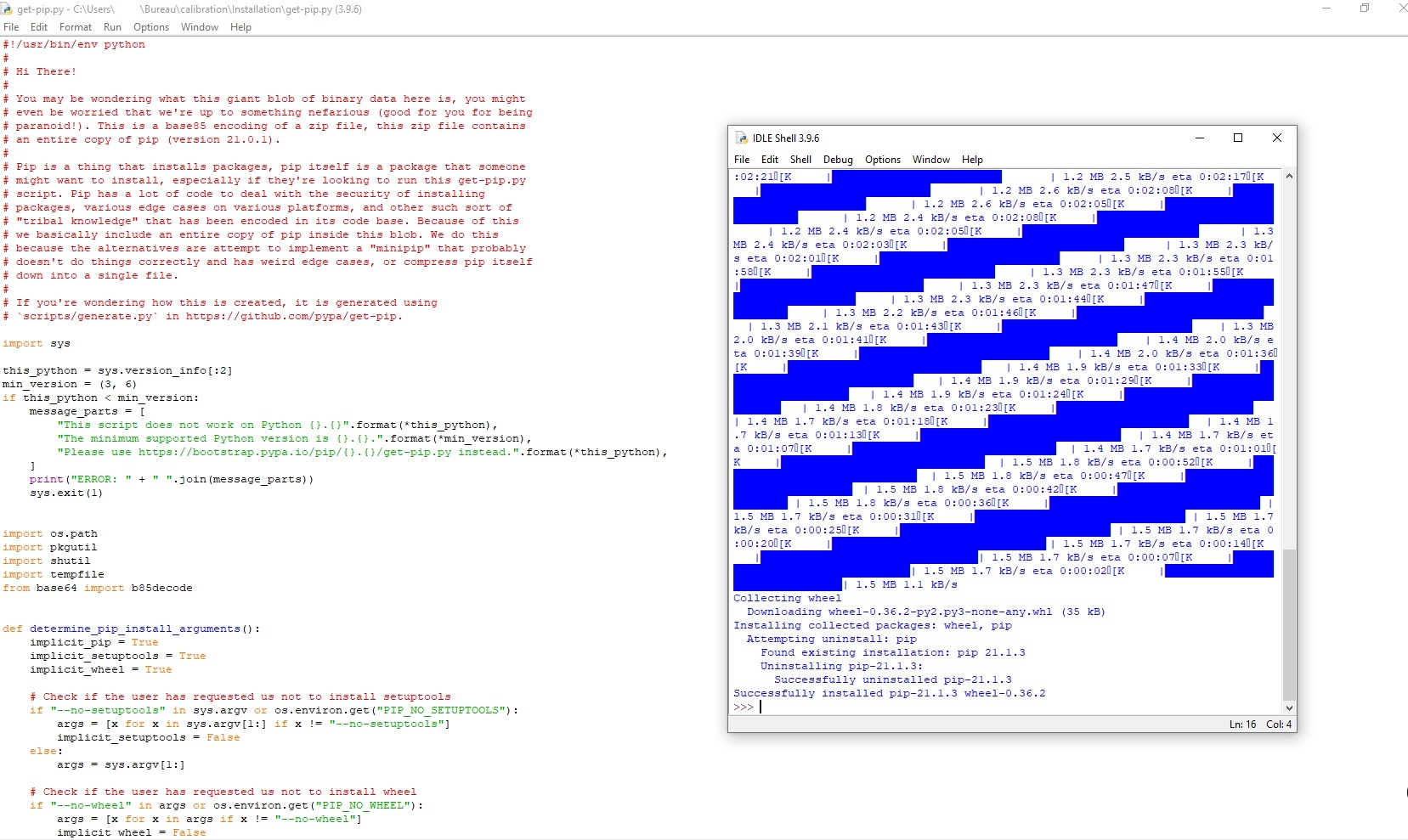
3. Lancer IDLE python, dans l’IDLE : File>Open et ouvrir le fichier
get-pip.py qui se trouve dans le dossier calibration/Installation.
Appuyez sur F5 une fois le fichier ouvert pour exécuter le programme
get-pip.py.
4. Une fois l’exécution terminée, ouvrez une invite de commande Windows.
Copiez et exécutez la commande suivante : python -m pip install --user numpy
scipy matplotlib ipython jupyter pandas sympy nose
Redémarrez l’ordinateur une fois la commande exécutée et terminée.
5. Supprimez le fichier RECORD00.CAL déjà présent dans le dossier
calibration qui est sur votre bureau
6. Copiez le fichier RECORD00.CAL qui a été généré sur la carte SD dans le
dossier calibration qui est sur votre bureau
7. Lancez IDLE python, dans l’IDLE : File>Open et ouvrir le fichier
calibrate.py qui se trouve dans le dossier calibration qui est sur votre
bureau
8. Appuyez sur F5 pour lancer le programme
9. Vous pouvez également écrire directement la commande python
calibrate.py sur une invite de commande windows, après avoir changé de
répertoire (commande cd) pour vous placer dans le dossier calibration :
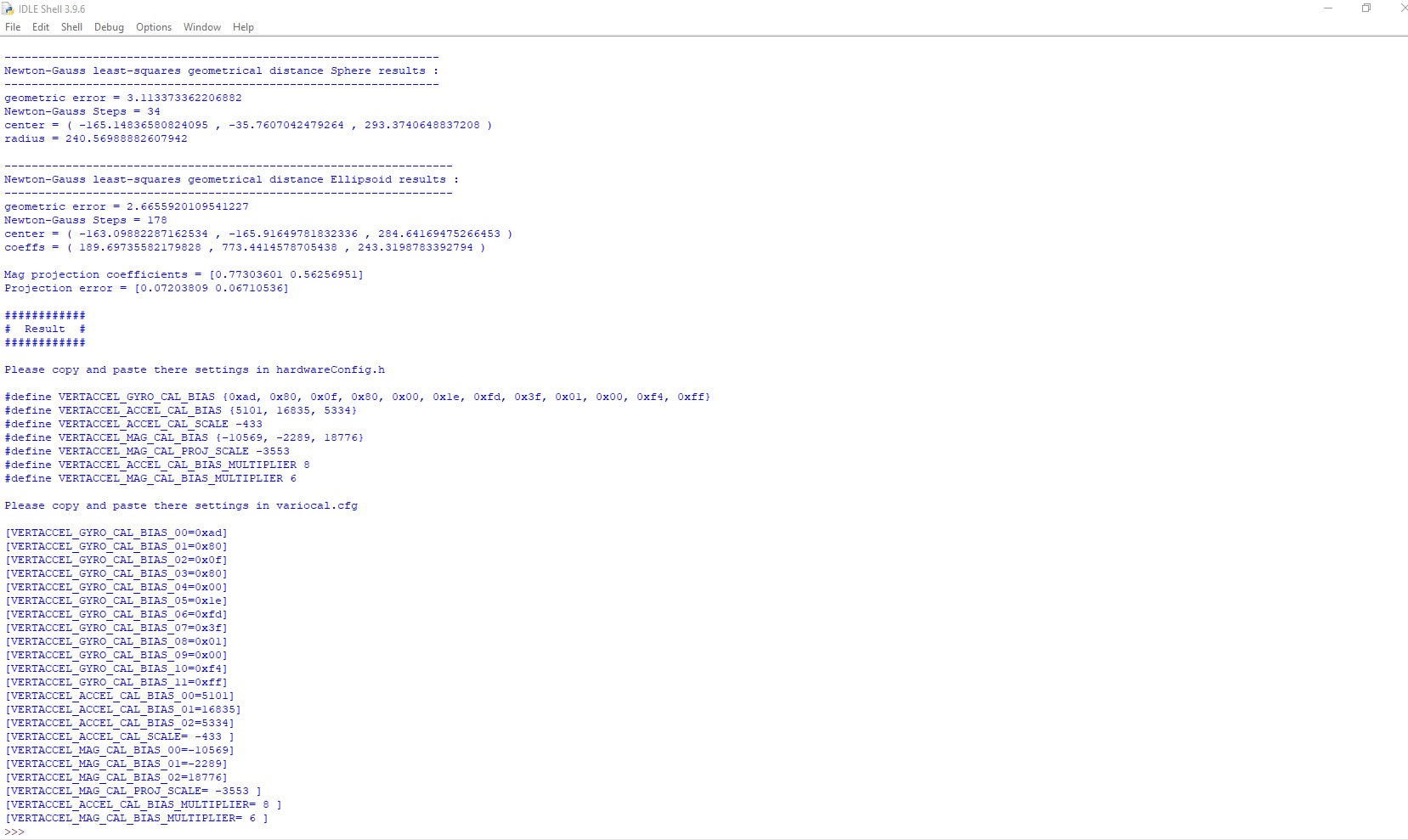
10. À la fin de l’exécution du programme, copiez l’ensemble des paramètres
de la calibration dans le fichier variocal.cfg présent sur la carte SD.
Exemple de fichier `variocal.cfg` mis à jour avec des valeurs de calibration :
[VERSION=1.0]
/* Calibration */
[VERTACCEL_GYRO_CAL_BIAS_00=0xad]
[VERTACCEL_GYRO_CAL_BIAS_01=0x80]
[VERTACCEL_GYRO_CAL_BIAS_02=0x0f]
[VERTACCEL_GYRO_CAL_BIAS_03=0x80]
[VERTACCEL_GYRO_CAL_BIAS_04=0x00]
[VERTACCEL_GYRO_CAL_BIAS_05=0x1e]
[VERTACCEL_GYRO_CAL_BIAS_06=0xfd]
[VERTACCEL_GYRO_CAL_BIAS_07=0x3f]
[VERTACCEL_GYRO_CAL_BIAS_08=0x01]
[VERTACCEL_GYRO_CAL_BIAS_09=0x00]
[VERTACCEL_GYRO_CAL_BIAS_10=0xf4]
[VERTACCEL_GYRO_CAL_BIAS_11=0xff]
[VERTACCEL_ACCEL_CAL_BIAS_00=5101]
[VERTACCEL_ACCEL_CAL_BIAS_01=16835]
[VERTACCEL_ACCEL_CAL_BIAS_02=5334]
[VERTACCEL_ACCEL_CAL_SCALE= -433 ]
[VERTACCEL_MAG_CAL_BIAS_00=-10569]
[VERTACCEL_MAG_CAL_BIAS_01=-2289]
[VERTACCEL_MAG_CAL_BIAS_02=18776]
[VERTACCEL_MAG_CAL_PROJ_SCALE= -3553 ]
[VERTACCEL_ACCEL_CAL_BIAS_MULTIPLIER= 8 ]
[VERTACCEL_MAG_CAL_BIAS_MULTIPLIER= 6 ]11. Replacer la carte SD dans votre variomètre. Il est maintenant calibré.
Instructions pour les utilisateurs de Linux
-
Ouvrir un terminal de commande
-
Créer un répertoire temporaire, dans lequel effectuer la calibration (dans l’exemple ci-dessous, il s’appelle
demo), puis déplacez vous dans ce nouveau répertoire.mkdir demo cd demo -
Copiez le dossier
calibrationdeRootSDdans le dossierdemo, puis déplacez vous dans ce nouveau répertoire.Si vous avez le logiciel
git, une manière de procéder peu élégante, consiste à cloner le dépôt logiciel depuis Github, puis à y récupérer le dossier :git clone https://github.com/prunkdump/GNUVario-TTGO-T5.git cp -r "./GNUVario-TTGO-T5/Sources/RootSd/Pour v0.8b6/RootSD/calibration" . cd calibration -
Comme il n’est pas très propre, autant faire un peu de nettoyage avant de commencer.
rm -rf *.pyc *.old __pycache__ -
Copiez les mesures effectuées précédemment — c’est-à-dire le fichier
RECORD00.CALqui a été généré sur la carte SD — dans le dossiercalibration -
Mise à jour de
pip, et récupération depipenv(qui va permettre de tout faire dans un environnement virtuel avec la bonne version de Python, puis de l’effacer après coup, de manière à ne pas polluer votre ordinateur)python -m pip install --upgrade pip python -m pip install pipenv -
Création puis lancement de l’environnement virtuel
python -m pipenv --python 3.7 python -m pipenv shell -
Installation des librairies requises dans l’environnement
python -m pip install numpy scipy matplotlib ipython jupyter pandas sympy nose -
Calibration
python calibrate.pyRecopiez les valeurs générées dans un fichier
variocal.cfg(voir plus haut l’exemple de fichiervariocal.cfgmis à jour avec des valeurs de calibration) -
Sortie de l’environnement virtuel, puis suppression de l’environnement virtuel et du dossier temporaire de travail
exit pip -m pipenv --rm cd .. cd .. rm -rf demo